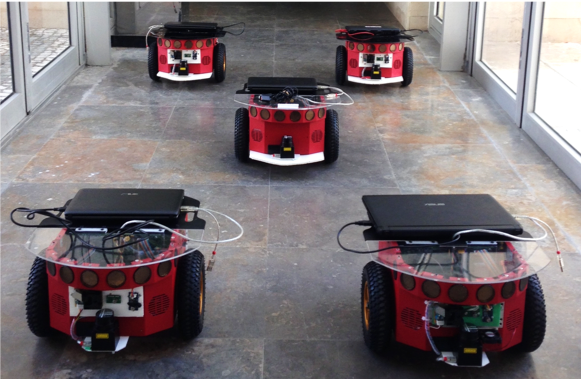
Motivation: surveillance tasks can be dangerous in some scenarios; are dull and prone to be automated with teams of robots, hence multi-robot patrolling
Problem: multi-robot coordination to visit as often as possible security spots in large areas and clear threats
Sub-Problems: distributed decision (no central point of failure); resiliency and adaptation to varying team size
Key Scientific Contributions:
D. Portugal and R. P. Rocha, “Performance Estimation and Dimensioning of Team Size for Multi-Robot Patrol”, IEEE Intelligent Systems, 32(6):30-38, Nov./Dec. 2017 (IF: 2.596)
D. Portugal and R. P. Rocha, “Cooperative Multi-Robot Patrol with Bayesian Learning”, Autonomous Robots, 40(5):929-953, 2016 (IF: 2.244)
D. Portugal, C. Pippin, R. P. Rocha and Henrik I. Christensen, “Finding Optimal Routes for Multi-Robot Patrolling in Generic Graphs”, In Proc. of IROS 2014, pp. 363-369, Sep. 14-18, 2014
Technology Transfer:
STOP project – on-going joint project with a company; focus on automatic perception of threats in real scenarios