Projects
UrbanScan
3D modeling of urban scenes with a new stereo approach
01/01/2014 - 31/12/2014
Research Area
Perceptual and Cognitive Systems
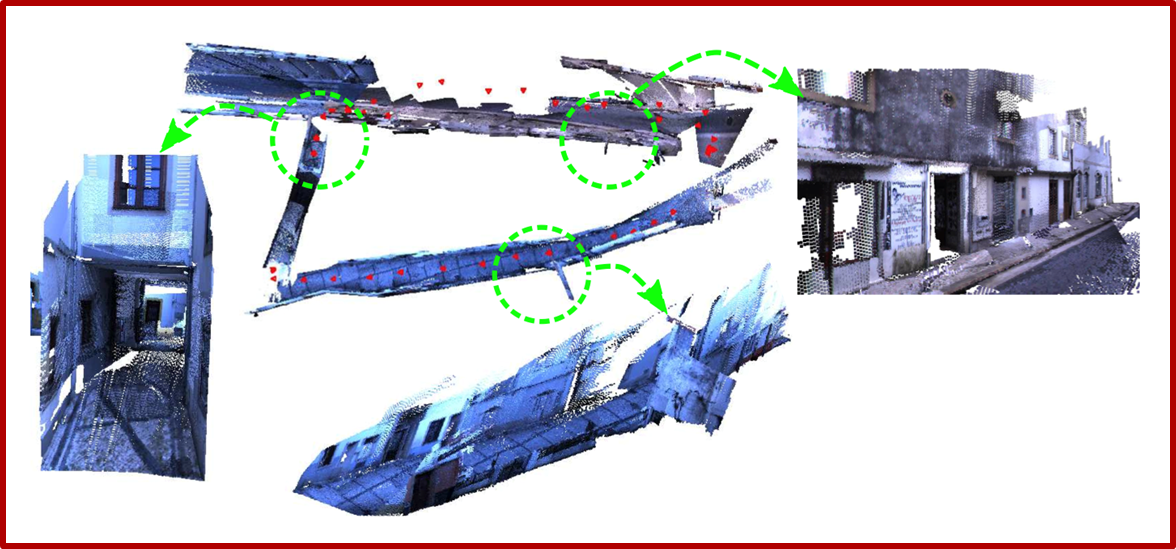
In this project we propose a mobile reconstruction system based on 3D vision algorithms for obtaining models of entire city streets. The novelty with respect to previous systems is the development of a processing pipeline able to conciliate reconstruction accuracy with fast execution “on-the-fly“. If succeeded, the project will provide the grounds of a scalable solution for the 3D modeling of entire cities, which has a broad range of applications, as proven by the interest of major players like Google. In addition, the methods and techniques herein developed will be highly relevant for autonomous robots and intelligent transportation systems, that can highly benefit from real-time 3D perception of urban environments.
Reference
Google Faculty Research Award
Funding entity
Role of ISR
Participation



