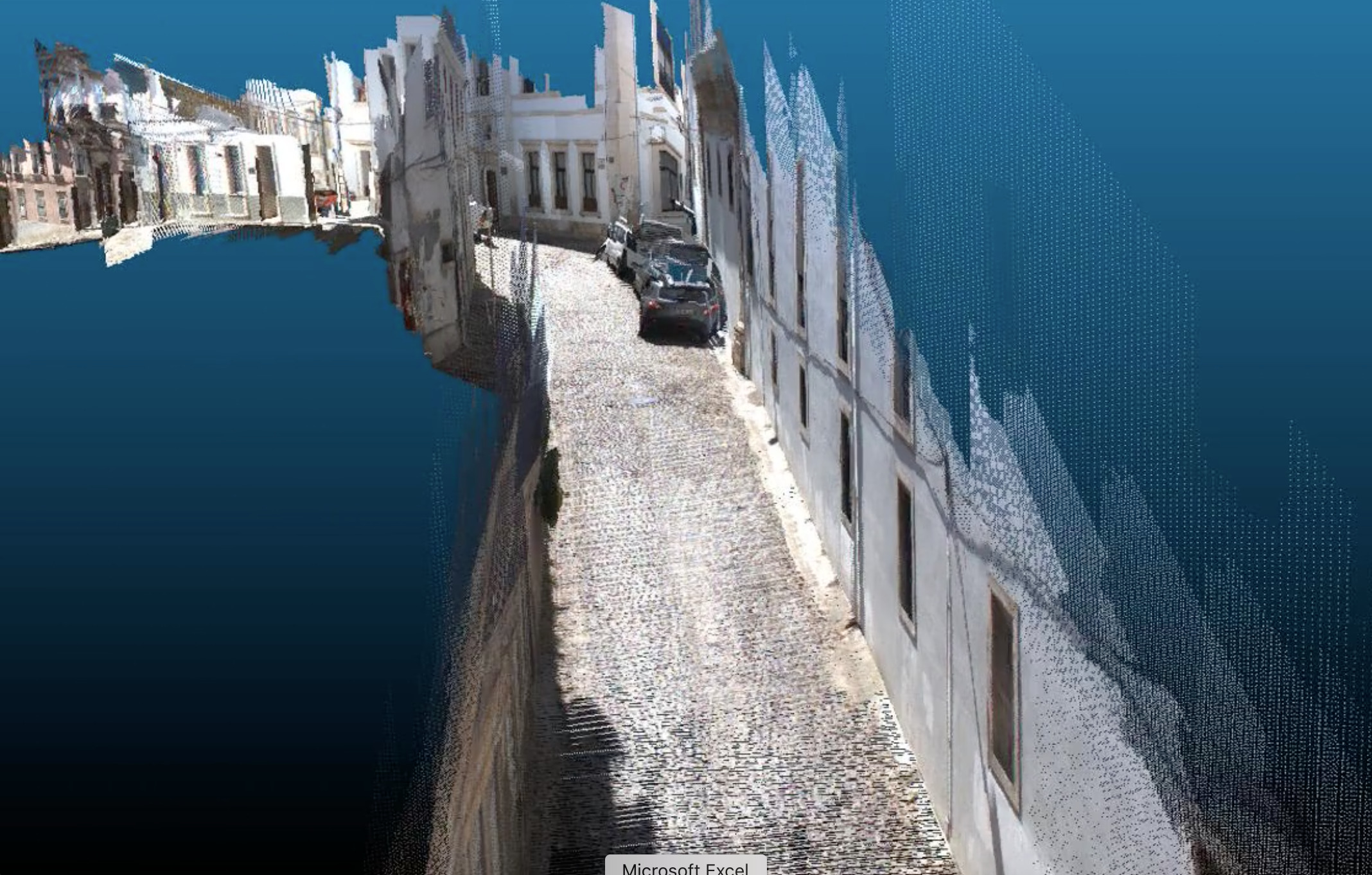
In the last decade there was strong progress in visual 3D reconstruction of urban landscapes with the 3D models being available in consumer applications such as Google Maps and Google Earth. These models enable visually pleasant fly-overs but, since they are obtained from satellite/aerial imagery, the quality of the experience strongly deteriorates whenever the user attempts walk-throughs at ground level. The ISR-UC devoted substantial effort to this problem by creating the StereoScan, which is a SfM pipeline that uses plane primitives instead of point primitives, and that outputs dense, visually pleasant urban models at ground-level from video acquired by stereo cameras mounted in a moving vehicle. More recently the team has built in its recent theory of using Affine Correspondences (ACs) for SfM to create the PiMatch that outputs piecewise planar reconstructions with the same quality as StereoScan but using monocular video. The PiMatch pipeline runs currently at 1 frame per second, which means that it can be potentially used for on-the-fly operation in robotic and autonomous driving applications. This line of work was awarded with a “Google Faculty Research Award” in 2014 and led to results that were published in high profile conferences (ECCV,CVPR) and journals (TPAMI).
Plane-based Sequential Structure-from-Motion (SfM) for 3D Modeling of Man-made Environments
- Written by Francisco Lisboa
- Category: Other Contributions
- Hits: 440